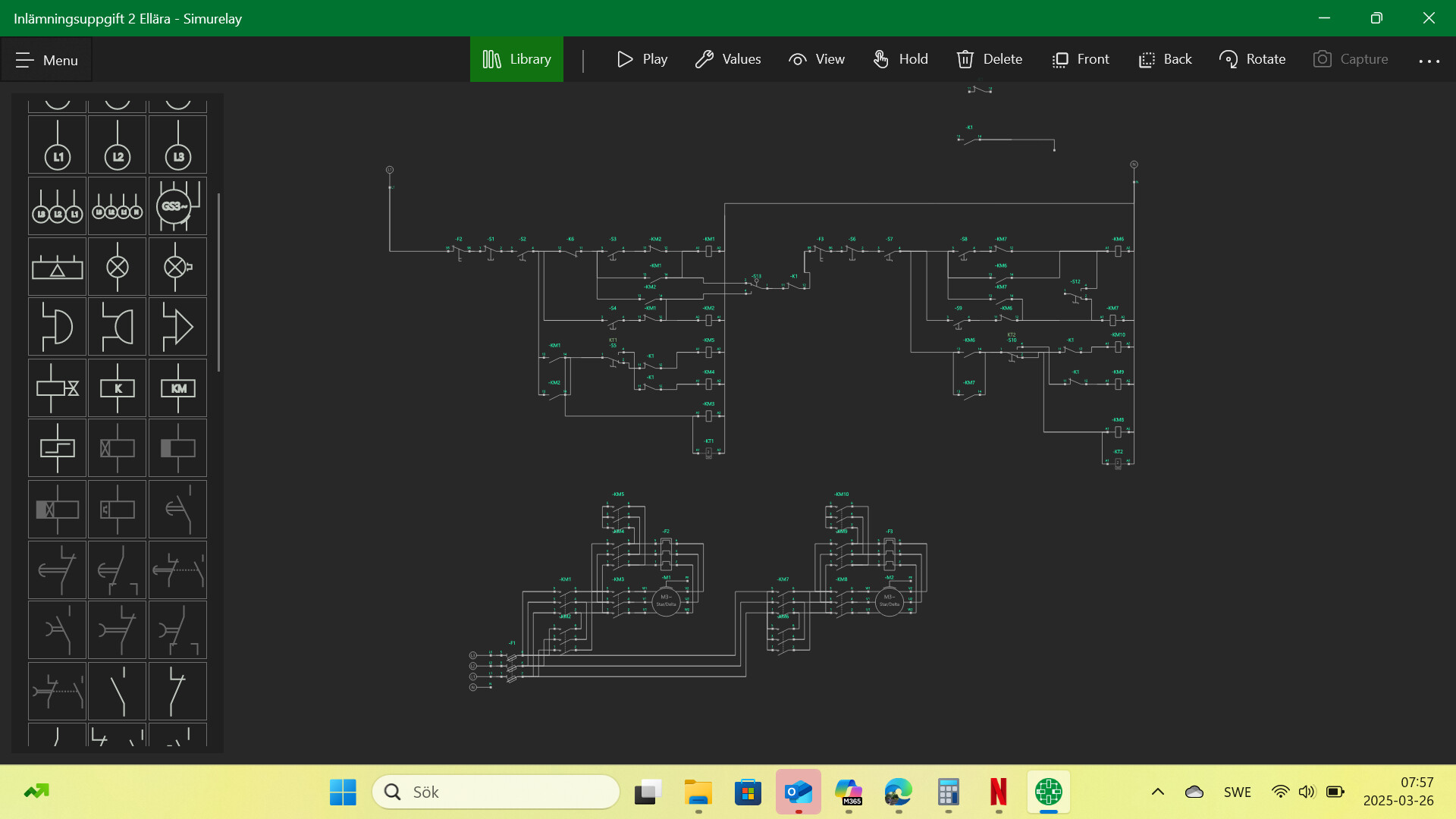
Jag läser ellära och har fått i uppgift att rita ett styrschema för en travers med 2 motorer i ett vindkraftverk med Y-D start och gränslägesgivare för bott- och toppläge för den hissande motorn och även för den andra motorn i sidled. Jag har lite svårt för att förstå logiken och nu när jag ska integrera de båda styrkretsarna med varandra tar det stopp. Motor 2 som går i sidled ska ej kunna köras om inte motor 1 är i sitt toppläge och den hissande motorn ska inte gå att köra om inte motor 2 är inom en viss spann. Jag har försökt i några dagar i Simurelay att få till funktionen utan att lyckas. Skulle vara tacksam för lite vägledning utan att för den skull få lösningen serverad på ett silverfat, eftersom jag gärna vill lära mig något också. Jag har en fråga angående det hängmanöverdon som skall användas för att styra traversen. Skall den ritas som en egen del som går från från de båda styrkretsarnas startfunktion. Bifogar en bild med hur schemat ser ut nu och väntar tacksamt på lite vägledning.
Till att börja med så är det i din text inte helt klart hur du tänker med gränslägena.
Normala telfrar har två gränslägesbrytare inbyggt som dels stoppar telfern från att gå för långt upp och dels hindrar den från att dra in kättningens ändlås i kothjulet. Normalt så förreglar gränslägesbrytaren för "uppe" UPP-knappen på manöverdonet och gränslägesbrytaren för "hela kättingen ute" NER-knappen på så vis att gränslgesbrytarna är NC och således bryter manöverkretsen när de påverkas. Du kan på samma vis förregla hela manöverkretsen till åket med hjälp av en NO-kontakt i gränslägesbrytaren för "uppe". Dvs åkets manöverkrets fungerar endast när telfern har luft till sin högsta höjd.
Förreglingen av åket är besvärligare. Enkla pelarkranar och småtraverser brukar inte ha varesig förregling eller ändstopp på åken utan man nöjer sig med att drivhjulen slirar på banan om man kör mot det fysiska ändstoppet. Större traverser och system med flera traverser och telfrar brukar ha både gränslägesbrytare i ändarna och förreglingar sins emellan. Jag tolkar det som om din travers ska ha ett område mitt på balken inom vilket den får lyfta. Enklast och säkrast är att sätta en fysisk nock på balken i det område där lyft får ske och sätta en gränslägesbrytare NO som påverkas av nocken och förreglar telferns UPP och NER knapp. Annars behöver du någon form av hållkrets som påverkas av passage av en nock in respektive ut ur området. Men det känns inte så säkert.
Du borde kunna hitta scheman på vanliga telfrar i manualer till någon telfer så får du ett exempel på hur de är kopplade med förreglingen av upp respektive ner. Utgå från det och lägg till det du behöver.
Normala telfrar har två gränslägesbrytare inbyggt som dels stoppar telfern från att gå för långt upp och dels hindrar den från att dra in kättningens ändlås i kothjulet. Normalt så förreglar gränslägesbrytaren för "uppe" UPP-knappen på manöverdonet och gränslägesbrytaren för "hela kättingen ute" NER-knappen på så vis att gränslgesbrytarna är NC och således bryter manöverkretsen när de påverkas. Du kan på samma vis förregla hela manöverkretsen till åket med hjälp av en NO-kontakt i gränslägesbrytaren för "uppe". Dvs åkets manöverkrets fungerar endast när telfern har luft till sin högsta höjd.
Förreglingen av åket är besvärligare. Enkla pelarkranar och småtraverser brukar inte ha varesig förregling eller ändstopp på åken utan man nöjer sig med att drivhjulen slirar på banan om man kör mot det fysiska ändstoppet. Större traverser och system med flera traverser och telfrar brukar ha både gränslägesbrytare i ändarna och förreglingar sins emellan. Jag tolkar det som om din travers ska ha ett område mitt på balken inom vilket den får lyfta. Enklast och säkrast är att sätta en fysisk nock på balken i det område där lyft får ske och sätta en gränslägesbrytare NO som påverkas av nocken och förreglar telferns UPP och NER knapp. Annars behöver du någon form av hållkrets som påverkas av passage av en nock in respektive ut ur området. Men det känns inte så säkert.
Du borde kunna hitta scheman på vanliga telfrar i manualer till någon telfer så får du ett exempel på hur de är kopplade med förreglingen av upp respektive ner. Utgå från det och lägg till det du behöver.

Du kanske ska fundera lite i stort kring uppgiften tex varför Y/D? Det är inte direkt lämpligt här tillför inget, bättre i så fall med val av motor med flera hastigheter. Och om du måste ha Y/D kan du modifiera huvudkretsarna och spara in komponenter där.
Manövern ser också rörig ut i förhållande till uppgiften och PNO har ju gett råd för hur du bättre kan komma framåt där. För lösning av zonen i åkled kan du välja typiska brytare för detta fallet som mekaniskt eller magnetiskt vippar över när de går in och ut ur zonen. Du får då kontakter att använda som antingen är slutna eller brutna i zon. Det blir alltså bara en komponent som sköter den delen helt oberoende av om matning finns eller ej om något skulle flytta sig stämmer infon alltid ändå.
Du får visa nästa version när du är klar.
Manövern ser också rörig ut i förhållande till uppgiften och PNO har ju gett råd för hur du bättre kan komma framåt där. För lösning av zonen i åkled kan du välja typiska brytare för detta fallet som mekaniskt eller magnetiskt vippar över när de går in och ut ur zonen. Du får då kontakter att använda som antingen är slutna eller brutna i zon. Det blir alltså bara en komponent som sköter den delen helt oberoende av om matning finns eller ej om något skulle flytta sig stämmer infon alltid ändå.
Du får visa nästa version när du är klar.
Får vi se slutresultatet? Och fick du godkänt på uppgiften?E Elelev skrev:Jag läser ellära och har fått i uppgift att rita ett styrschema för en travers med 2 motorer i ett vindkraftverk med Y-D start och gränslägesgivare för bott- och toppläge för den hissande motorn och även för den andra motorn i sidled. Jag har lite svårt för att förstå logiken och nu när jag ska integrera de båda styrkretsarna med varandra tar det stopp. Motor 2 som går i sidled ska ej kunna köras om inte motor 1 är i sitt toppläge och den hissande motorn ska inte gå att köra om inte motor 2 är inom en viss spann. Jag har försökt i några dagar i Simurelay att få till funktionen utan att lyckas. Skulle vara tacksam för lite vägledning utan att för den skull få lösningen serverad på ett silverfat, eftersom jag gärna vill lära mig något också. Jag har en fråga angående det hängmanöverdon som skall användas för att styra traversen. Skall den ritas som en egen del som går från från de båda styrkretsarnas startfunktion. Bifogar en bild med hur schemat ser ut nu och väntar tacksamt på lite vägledning.
")
Klicka här för att svara