
Då elmont vill veta varför rörmotorer inte ska parallellkopplas så får jag väl bli lite mer teknisk och förklara varför då intresset finns för att lära.
Nu har jag inte någon gedigen erfarenhet av just markiser men genom mitt säkerhetsarbete så har jag stor erfarenhet av motoriserade jalusier/rullgaller och rörmotorer mm är det samma.
Jag tänker börja lite lätt och kanske fördjupa mig lite och beskriva 230V rörmotorer med mekaniska gränslägen.
Förenklat så är det så att rörmotorer har en kondensator som orsakar backströmmar som i sin tur bakvägen strömsätter motor 2 i en motsatt önskad riktning, detta brukar kallas "jojo-effekten".
Motorer med elektroniska gränslägen har inbyggt relä, så bara för att montören slipper använda en reläbox betyder egentligen inte att det inte behöver något relä.
Nu skrapar vi lite djupare på ytan och blir lite mer tekniska.
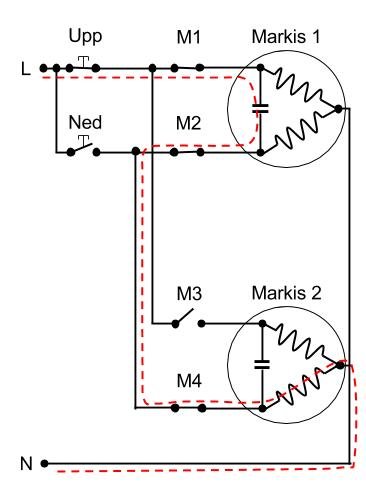
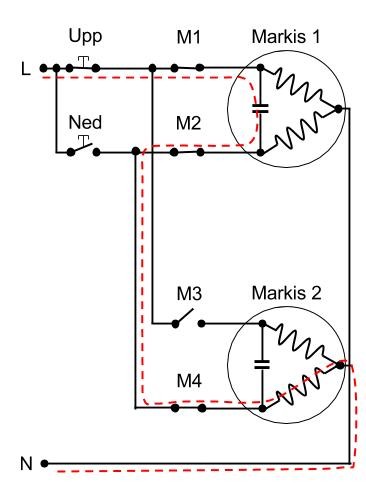
Vi har 2st motorer av samma typ som vi parallellkopplar dessa motorer kallar jag motor 1 samt motor 2.
Motorerna har ett övre och ett undre gränsläge M1 och M2 för motor 1 samt M3 och M4 för motor 2 gränslägesbrytarna M1-4 kommer även användas för att beskriva inkommande matning.
Mellan gränslägena på var motor finns en kondensator inkopplad (på äldre rörmotorer så vad kondensatorn extern).
Om vi nu påverkar brytaren/omkopplaren så körs de parallellkopplade motorerna uppåt (jag använder upp och ner istället för in eller ut) och även om vi tycker att motorerna roterar i samma hastighet så gör de inte det beroende av motorexemplar belastning på motorn alltså vilken tyngd motorn belastas med.
I detta exempel så väljer jag att motor 2 går lite snabbare och når sitt övre gränsläge före motor 1 och gränsläges brytare M3 bryter spänningen för motor roteringen uppåt.
Motor 1 fortsätter att rotera enligt önskemål då den fortfarande har ström och inte nått sitt gränsläge än.
Men nu börjar det hända oönskade saker då motor 2 får ström över M4 via kretsen gränslägesbrytare M1 > kondensator i motor 1 > gränslägesbrytare M2 > gränslägesbrytare M4 , motor 2 förses alltså nu med ström på M4 via motor 1:s driftkondensator.
Motor 2 får alltså ström för att rotera nedåt och kan börja oönskat, (ibland så fortsätter en motor i önskad riktning men kan ta stryk).
Om nu motor 1 når övre gränsläge så faller matningen på M4 men då motor 2 inte längre är i sitt övre gränsläge så får den nu matning över M3 och vänder och går uppåt varpå motor 1 nu istället får ett oönskat beteende precis som motor 2 tidigare och jojo-effekten har uppstått.
I början kanske skillnaderna känns minimala och knappt märkbara men med tiden så "vandrar" de och skillnaderna blir tydligare och tydligare och felet märks mer och mer tills det blir omöjligt att köra upp båda motorerna.
För att det skulle vara möjligt att parallellkoppla flera rörmotorer så krävs det att det bryter exakt samtidigt vilket aldrig sker i praktiken.
Förutom det uppenbara med att det blir problem att manövrera så kommer motorerna att lägga av i förtid och det kommer uppstå bekymmer vid eventuella garantianspråk, och goodwill borde i det här fallet vara att den goda viljan fanns att koppla rätt från första början.
Lindningarna i motorerna är likadana men fungerar olika beroende på rotationsriktningen.
I ena rotationsriktningen fungerar den första lindningen en arbetsspole medan den andra lindningen fungerar som en hjälpspole och ändras rotationsriktningen så blir funktionen den omvända spole1 som hjälpspole och spole 2 som arbetsspole.
Spänningen över kondensatorn måste vid en nätspänning av 220V uppgå till ca 320V, för att ett symmetriskt magnetiskt roterande fält skall uppnås i statorn.
Hoppas att det klarnar nu varför det krävs flerpoliga reläer eller strömställare för att manövrera flera motorer.
Nu har jag inte någon gedigen erfarenhet av just markiser men genom mitt säkerhetsarbete så har jag stor erfarenhet av motoriserade jalusier/rullgaller och rörmotorer mm är det samma.
Jag tänker börja lite lätt och kanske fördjupa mig lite och beskriva 230V rörmotorer med mekaniska gränslägen.
Förenklat så är det så att rörmotorer har en kondensator som orsakar backströmmar som i sin tur bakvägen strömsätter motor 2 i en motsatt önskad riktning, detta brukar kallas "jojo-effekten".
Motorer med elektroniska gränslägen har inbyggt relä, så bara för att montören slipper använda en reläbox betyder egentligen inte att det inte behöver något relä.
Nu skrapar vi lite djupare på ytan och blir lite mer tekniska.
Vi har 2st motorer av samma typ som vi parallellkopplar dessa motorer kallar jag motor 1 samt motor 2.
Motorerna har ett övre och ett undre gränsläge M1 och M2 för motor 1 samt M3 och M4 för motor 2 gränslägesbrytarna M1-4 kommer även användas för att beskriva inkommande matning.
Mellan gränslägena på var motor finns en kondensator inkopplad (på äldre rörmotorer så vad kondensatorn extern).
Om vi nu påverkar brytaren/omkopplaren så körs de parallellkopplade motorerna uppåt (jag använder upp och ner istället för in eller ut) och även om vi tycker att motorerna roterar i samma hastighet så gör de inte det beroende av motorexemplar belastning på motorn alltså vilken tyngd motorn belastas med.
I detta exempel så väljer jag att motor 2 går lite snabbare och når sitt övre gränsläge före motor 1 och gränsläges brytare M3 bryter spänningen för motor roteringen uppåt.
Motor 1 fortsätter att rotera enligt önskemål då den fortfarande har ström och inte nått sitt gränsläge än.
Men nu börjar det hända oönskade saker då motor 2 får ström över M4 via kretsen gränslägesbrytare M1 > kondensator i motor 1 > gränslägesbrytare M2 > gränslägesbrytare M4 , motor 2 förses alltså nu med ström på M4 via motor 1:s driftkondensator.
Motor 2 får alltså ström för att rotera nedåt och kan börja oönskat, (ibland så fortsätter en motor i önskad riktning men kan ta stryk).
Om nu motor 1 når övre gränsläge så faller matningen på M4 men då motor 2 inte längre är i sitt övre gränsläge så får den nu matning över M3 och vänder och går uppåt varpå motor 1 nu istället får ett oönskat beteende precis som motor 2 tidigare och jojo-effekten har uppstått.
I början kanske skillnaderna känns minimala och knappt märkbara men med tiden så "vandrar" de och skillnaderna blir tydligare och tydligare och felet märks mer och mer tills det blir omöjligt att köra upp båda motorerna.
För att det skulle vara möjligt att parallellkoppla flera rörmotorer så krävs det att det bryter exakt samtidigt vilket aldrig sker i praktiken.
Förutom det uppenbara med att det blir problem att manövrera så kommer motorerna att lägga av i förtid och det kommer uppstå bekymmer vid eventuella garantianspråk, och goodwill borde i det här fallet vara att den goda viljan fanns att koppla rätt från första början.
Lindningarna i motorerna är likadana men fungerar olika beroende på rotationsriktningen.
I ena rotationsriktningen fungerar den första lindningen en arbetsspole medan den andra lindningen fungerar som en hjälpspole och ändras rotationsriktningen så blir funktionen den omvända spole1 som hjälpspole och spole 2 som arbetsspole.
Spänningen över kondensatorn måste vid en nätspänning av 220V uppgå till ca 320V, för att ett symmetriskt magnetiskt roterande fält skall uppnås i statorn.
Hoppas att det klarnar nu varför det krävs flerpoliga reläer eller strömställare för att manövrera flera motorer.

....och därför är ByggaHus mitt favoritforum ")
Får man möjligen besvära om en förklaring till det där med att man inte ska styra via växlande reläkontakt och att man inte får lägga på ström i mer än tre minuter på somfys motorer (de är ju sannolikt relaterade)...
Får man möjligen besvära om en förklaring till det där med att man inte ska styra via växlande reläkontakt och att man inte får lägga på ström i mer än tre minuter på somfys motorer (de är ju sannolikt relaterade)...
Hobbyelektriker
· Värmland, Molkom
· 26 837 inlägg
De kanske menar att ett växlande relä innebär att ena polen alltid är strömsatt?
Var tvungen att rita en bild på abc's beskrivning för att själv förstå. Så här blir det om jag fått med det korrekt.
Var tvungen att rita en bild på abc's beskrivning för att själv förstå. Så här blir det om jag fått med det korrekt.
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Styr man med en växlande kontakt så är man beroende av att ändlägesbrytarna fungerar. Förr eller senare krånglar en ändlägesbrytare, och har man då en växlande kontakt eller att man på annat sätt spänningssätter motorn mer än 3 minuter så kommer något dyrt gå sönder.
Ok, så om man har ett växlande relä som bestämmer körriktning och ett annat som spänningssätter så skulle man behöva en säkerhet av något slag i det matande reläet som gör att det aldrig kan ligga draget mer än tre minuter. Kan detta finnas i "mjukvara" i mikrokontrollern eller måste det vara en hårdvarulösning med timer? Känns som att man borde kunna bygga in det i styrlogiken, det är ju inte konstigare än att det finns risk för att en återfjädrande brytare fallerar.
Klicka här för att svara