Någon som har en länk till en mer detaljerad teknisk beskrivning hur signalen i en begränsning slinga ser ut och hur den fungerar på teknisk nivå när roboten känner av slinga mm.
Är alltså ute efter tekniken bakom inte hur man ska installera etc.
Är alltså ute efter tekniken bakom inte hur man ska installera etc.
https://sv.wikipedia.org/wiki/HögerhandsregelnJ JanneSjo skrev:
Kort sagt så skickas strömpulser genom slingorna, Gardena har valt att skicka ut dessa på "vänster" och "guide" för att ta emot samtliga pulser på "höger" i laddstationen (motsols riktning på strömen alltså). Det gör att magnetfälten som bildas (enligt högerhandsregeln) alltid uppfattas från en och samma riktning när man befinner sig innanför gränskabeln. Står man utanför blir riktningen på magnetfältet motsatt.
Pulserna är dessutom kodade (inte riktigt som morsesignaler, men nästan) så det går att skilja på guidens och gränskabelns pulser, samt även grannens anläggning.
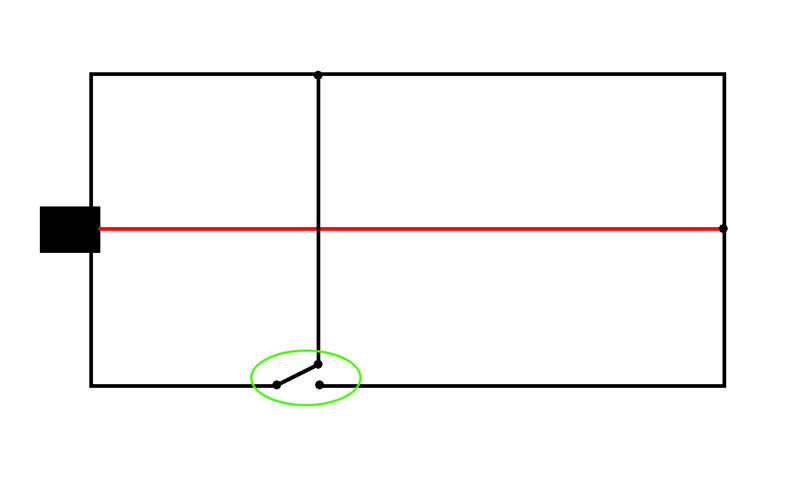
Eftersom strömmen går motsols får man tänka till lite om man sätter en omkopplare på gränskabeln för att växla mellan olika areor. Omkopplaren måste då sitta på "vänster" och inte "höger" för att guidekabeln skall fortsätta att fungera.
EDIT: Så här tex
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Redigerat:
Tack mycket bra förklarat.
Om man vill förkorta guideslingan, så antar jag att det då är samma tankesätt.
Tänker mig att ha en lång krokig guideslinga för att hantera flera passager och möjlighet att korta av den tillfälligt efter roboten startat.
Detta för att slippa köra hela vägen tillbaka i krokig väg, en genväg så att säga.
Mer för kul men lite att spara batteri.
Dessutom intresserad av tekniken bakom, kul att förstå, så tack för en bra beskrivning
Om man vill förkorta guideslingan, så antar jag att det då är samma tankesätt.
Tänker mig att ha en lång krokig guideslinga för att hantera flera passager och möjlighet att korta av den tillfälligt efter roboten startat.
Detta för att slippa köra hela vägen tillbaka i krokig väg, en genväg så att säga.
Mer för kul men lite att spara batteri.
Dessutom intresserad av tekniken bakom, kul att förstå, så tack för en bra beskrivning
Visst, det går lika bra att koppla om guiden på detta viset.J JanneSjo skrev:Tack mycket bra förklarat.
Om man vill förkorta guideslingan, så antar jag att det då är samma tankesätt.
Tänker mig att ha en lång krokig guideslinga för att hantera flera passager och möjlighet att korta av den tillfälligt efter roboten startat.
Detta för att slippa köra hela vägen tillbaka i krokig väg, en genväg så att säga.
Mer för kul men lite att spara batteri.
Dessutom intresserad av tekniken bakom, kul att förstå, så tack för en bra beskrivning
Det enda jag skulle undvika (oavsett guide eller gränskabel) är att koppla förbi någon del av kretsen på ett sådant sätt att strömmen kan gå både den gamla vägen och den nya vägen samtidigt (tex genom att använda en vanlig simpel strömbrytare i st för en trappbrytare, dvs en omkopplare). Signalen kan annars komma att försvagas i onödan.
Klicka här för att svara